






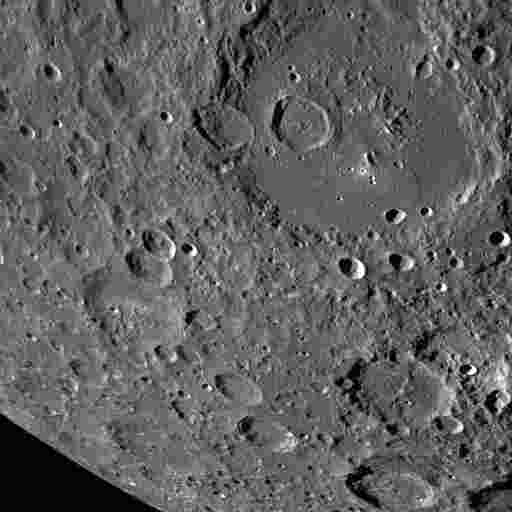


The lunar surface seen by the MBC. This is the first image from the multispectral camera on board the SLIM lander .
@JAXA
SLIM RECHARGES ITS BATTERIES
UPDATE JANUARY 29, 2024
JAXA, the Japanese space agency, has announced that it has managed to reconnect with its lunar craft. “We managed to establish communication with SLIM last night and have resumed operations!” explained the SLIM teams on X (formerly Twitter). “We immediately began scientific observations with MBC,” the multispectral camera on board the Japanese lander. JAXA also published an image of the lunar surface. If SLIM is working again it is “probably because the energy production of its solar battery resumed while it was exposed to sunlight,” explained a JAXA spokesperson to Agence France Presse. “We are going to prioritise what we can do, which is observe and collect information, rather than adjusting Slim ‘s position, which could make the situation worse.”




